Different Worlds in the Same Touch: The Essence of Diversity through Tactile Research
5/1/26

The Neurodiversity Project, sponsored by B Lab, aims to realize a society in which the diversity of the brain and nervous system is respected and everyone is able to exercise their abilities in their own way. In this Neurodiversity Project interview series, we introduce the efforts of Yoshihiro Tanaka, Ph.D., Professor at Nagoya Institute of Technology. (▲Picture 1▲), who has attracted attention for his exhibit on the human sense of touch at “The World in Our Minds” in 2025. Professor Tanaka’s Haptics Lab is engaged in research aimed at clarifying the principles of subjective tactile sensation and creating a human-friendly, sustainable, and progressive society with technologies that apply them. Nanako Ishido (▲Picture 2▲), Director of B Lab, interviewed Dr. Tanaka about his research activities.


> Interview video is also available!
Unlocking the Principles of Subjective Touch:
Applications in Healthcare, Sports Support, and Design
Ishido: “Dr. Tanaka is a leading researcher on the “sense of touch,” and you exhibited at ‘The World in Our Minds’ in 2025 as well. Can you tell us about that exhibit and the research you are involved in on a daily basis?”
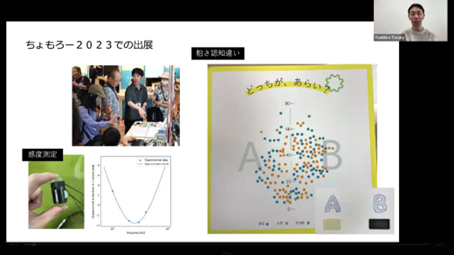
Dr. Tanaka: “The Tactile Science Laboratory at Nagoya Institute of Technology has been exhibiting at “Chomoro,” a project organized by B Lab, which is a collaboration between industry, government, academia, and the private sector to experience and co-create the future through technology, since FY2023. At the beginning of the project, we introduced a mechanism to measure the sensitivity of people’s sense of touch, and an exhibit to visualize and experience the difference in perception of “roughness” between roughness from bumpy surfaces and roughness from rough surfaces and scratches. (▲Picture 3▲)
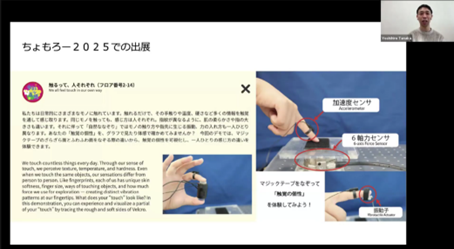
In 2024, together with the Neurodiversity Project and the Keio University Graduate School of Media Design (KMD) Embodied Media Project (KMD Embodied Media Project), we exhibited a survey of tactile sensitivity entitled “Tactility Test”. In 2025, under the theme of “Touch is different for each person,” we exhibited a demonstration that allows visitors to experience the individuality of the sense of touch by visualizing and experiencing how the vibrations and force applied to the fingertips vary from person to person, even when tracing in a natural way. (▲Picture 4▲)
Thus, I have been interested in individual differences in the sense of touch and have continued my research. Now, I will explain why I am interested in individual differences in tactile sensation, and what kind of applications and future will open up if we can understand individual differences.
The mission of the Tactile Science Laboratory is to ‘clarify the subjective sense of touch and contribute to the formation of a human-friendly, sustainable, and progressive society through applied technology. (▲Picture 5▲)

In particular, we focus on ‘subjective tactile sensation’. The senses are subjective, and there are many areas of research on tactile sensation that are still poorly understood. We call it “subjective tactile sensation” because it is a sensation associated with the mechanical contact between the environment and our body and is very difficult to handle. We believe that research on this subjective aspect and individual differences will lead to the formation of a human-friendly, sustainable, and progressive society.
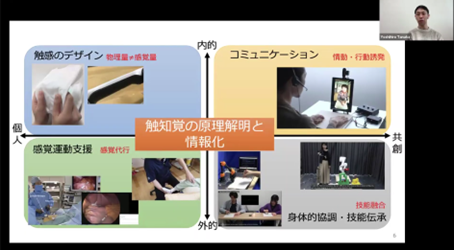
Next, I will explain our specific efforts. In the Tactile Science Laboratory, we are working on “Elucidation and Informatization of the Principle of Tactile Perception,” which is why we feel tactile sensation. This research aims to elucidate the principles of tactile perception and to inform tactile perception based on these principles. We are also working on the application of the sense of touch to design, incorporating the sense of touch into medical equipment, surgical support, medical and welfare-related exercise support, and rehabilitation, connecting people with their sense of touch for collaboration in physical coordination and skill transfer, and utilizing the sense of touch for communication to induce emotion and action. We are also working on research into the possibility of utilizing the sense of touch in communication to induce emotion and behavior. (▲Picture 6▲)
Core Characteristics of Touch: Self-Referentiality and Bidirectionality
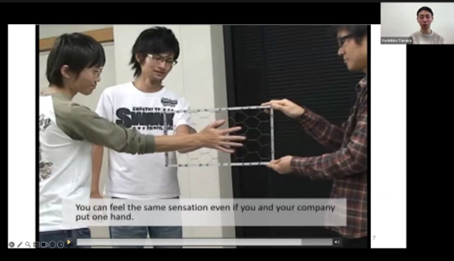
Next, I will explain how I came to focus on individual differences in the sense of touch. What prompted me to deepen my research on the sense of touch was my experience of an “illusion” called “Velvet Hand Illusion. It is just a wire mesh, but when you touch it in a certain way, you get a different feeling. When you touch the wire mesh with one hand, it feels like a wire mesh, but when you hold it between your hands, you can feel a smooth, slippery surface between your hands. (▲Picture 7▲)
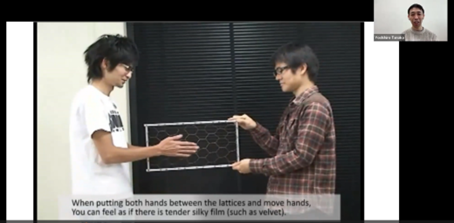
The original is in a museum in San Francisco, USA. You can feel the tactile sensation of the velvety, luxurious fabric. It is a special illusion with one’s own two hands, but it is known that the same sensation can occur with the hands of others. This is the essence of tactile sensation, so to speak, and this is where I began to delve deeper into the study of tactile sensation. (▲Picture 8▲)
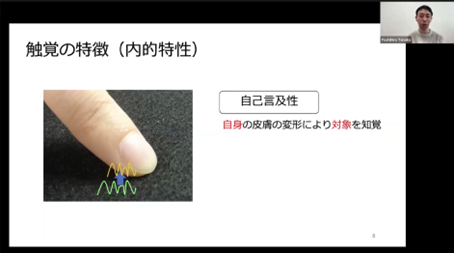
In tactile research, physical properties of an object such as roughness and hardness are usually measured and evaluated. However, in the Velvet Hand Illusion illusion, the wire mesh feels slimy to the touch, even though it is a wire mesh, and this happens even when using another person. In other words, the sense of touch is not based on the object itself, but rather on changes in one’s own body, such as skin deformation, vibration, and temperature changes. This is why I refer to it as ‘internal characteristics.
In Velvet Hand Illusion, the artist is touching a wire mesh object, but in the end, he is sensing the deformation and vibration of his own skin. This is called “self-referentiality. (▲Picture 9▲)
Then, if the pitch of the fingerprint is different or the hardness of the finger is different, the mechanical changes that occur there will also be different, so naturally, the physical phenomena that occur will be different even if the same object is touched. In other words, the way we feel is different. We realized that each of us has our own “different tactile world,” and we became interested in it and began to work on our research.
The other is that in Velvet Hand Illusion, the hands are moved together and felt, and we believe that the bidirectional nature between tactile and kinetic sensation contributes there. (▲Picture 10▲)
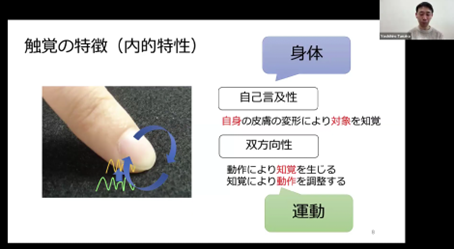
By moving your hands, you get the sense of touch, but at the same time you are changing the way you move your hands while getting the sense of touch. For example, when you touch a baby’s skin, you do not use strong force, but touch it gently, because you instantly think the other person is soft. There are individual differences as well. The body and movement are closely connected, and we began to focus on individual differences in the sense of touch because we believe that there are many individual differences in the sense of touch from a mechanical standpoint as well.”
Conducting Diverse Experiments to Explore Individual Differences and Tactile Diversity
Dr. Tanaka: “Here are some examples. For example, when you poke the skin of the fingertip with a pin, or impact the skin with a pin, the skin shakes and the vibration propagates across the surface of the skin. (▲Picture 11▲)
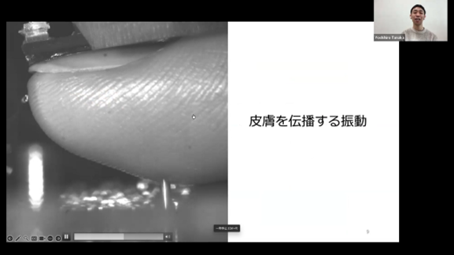
The vibration propagates not only to the area touched by the pin, but also to the area not touched by the pin because the vibration propagates. Our sense of touch is sensitive, so nerve firing occurs. We thought that by focusing on this area, we could collect a variety of data, so we created a wearable skin vibration sensor. (▲Picture 12▲)
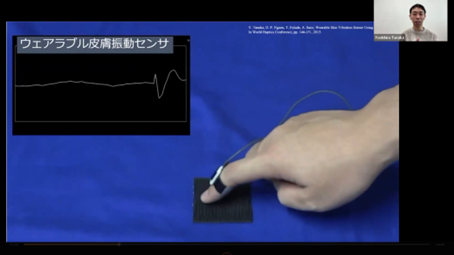
This system uses a sensor wrapped between the first and second joints of the finger to acquire the vibrations that propagate through the fingertip when the fingertip is rubbed or traced on a small square mat. Since the fingertip directly touches the object and the vibrations propagated by the fingertip are acquired, the data changes depending on the way the finger is touched and the hardness of the finger. We believe that this once-in-a-lifetime experience is the “sense of touch”.
Other simple experiments are also conducted. When the participants are asked to answer the roughness feeling while touching nearly 70 different materials, they can see the correspondence between the vibrating intensity of the skin and the roughness feeling. (▲Picture 13▲)
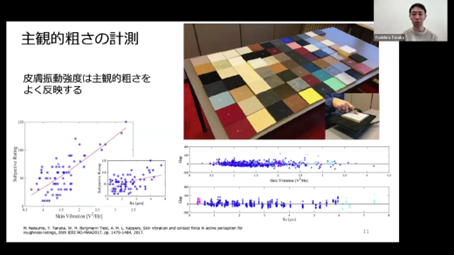
If we take the error between the actual blue measured value and the red estimated value, the top is the skin vibration and the bottom is the average height of the surface irregularity (arithmetic mean roughness), but if you look at the pink area in the figure below, the pink is aligned vertically. What this means is that the same material, when measured with a measuring instrument, produces the same value, but since each person has a different sensory perception, some people have a large margin of error, while others have the same error as estimated. On the other hand, if you look at the skin vibration above, you can see that it is spread out. Some people have large vibrations, some have small vibrations, and the error values are less. We can see that it is changing with the way we touch and the characteristics of the skin of our fingers, and that even if we touch the same object, the roughness sensation is different.
In the experiment to measure the ease of transmission of vibration, the frequency was taken on the horizontal axis and the ease of transmission on the vertical axis and plotted on a graph. (▲Picture 14▲)
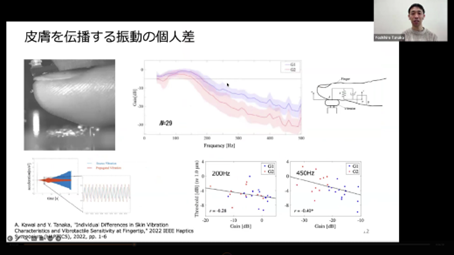
A survey of 29 college students revealed that when it comes to high frequency, there are individual differences, with some people being more sensitive to the transmission of high frequency and others less sensitive. When the ease of transmission of high-frequency waves was checked in relation to the sensitivity of the fingertips, there was a correlation, and the results showed that those who could easily transmit high-frequency waves were more sensitive. This is a mechanical characteristic, but we can see that even the mechanical characteristics of the skin have a relationship with sensitivity.
As you can see empirically, if you measure the coefficient of friction between the elderly and the young, the coefficient of friction is still smaller for the elderly than for the young. When we measure the hardness of the fingers, we find that the elderly have harder fingers. The vibration of the skin is also reduced and becomes duller. It becomes more difficult to manipulate things, for example, they may not be able to open a bag. The sense of touch changes with age as well as individual differences.
In actual experiments, for example, comparing the roughness of A and B or discriminating between A and B, we have found that the body adapts to the purpose or task, tracing quickly in the comparison experiment and slowly in the discrimination experiment. In this way, the senses are very complex.
Individual Differences in Touch as a Spectrum:
A Vast Range of Sensory Diversity
Let me tell you about a recent experiment. We have known that the pressing force varies considerably from person to person, but when we studied what causes this difference, we found that there is a difference in the amount of force, especially when “tracing”. (▲Picture 15▲)
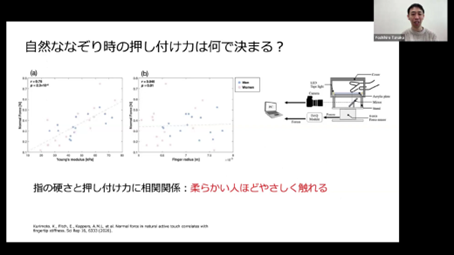
Further investigation revealed that there was a relationship with finger hardness: experiments on college students in their 20s showed that the harder the fingers, the stronger the pressing force, and the softer the fingers, the gentler the touch. We found that different people touch in different ways, and that this has a relationship with their own physical condition.
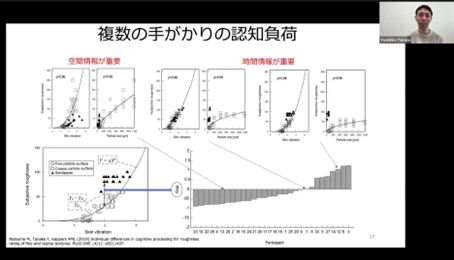
Next is an experiment on roughness perception. Roughness perception is affected by time information (vibration), spatial unevenness information, and friction coefficient information. (▲Picture 16▲)
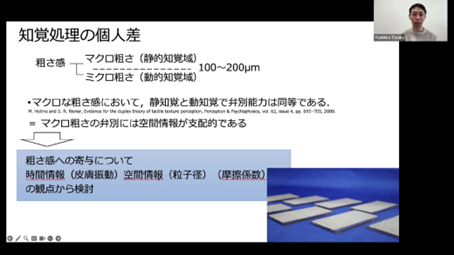
Prior research has shown that when the pitch is finer than 100 to 200 microns, there is no difference in sensitivity between tracing motion and mere touch. When no tracing motion is required, spatial information is considered to be the dominant factor. However, when looking at the correspondence with the actual roughness sensitivity, the results show that some people value space while others use vibration and friction, and the weights of these are different.
In other words, even when we hear rough or smooth, people have different evaluation criteria, and it is a gradation. I understand that there is that much diversity, and we have to be careful when we evaluate them. (▲Picture 17▲)
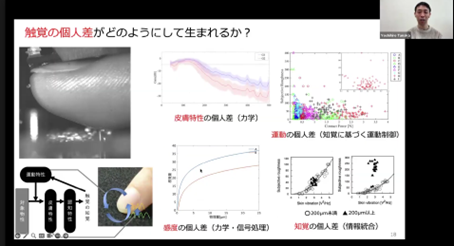
Thus, I have been interested in individual differences in tactile perception and have continued my research. Through my research, it has been very interesting to understand the relationship with mechanical skin properties and with individual differences in movement. Differences in sensitivity also have an impact, and differences in perception and information integration also emerge, and I think they are linked. I would like to study them and see the world of human tactile perception. (▲Picture 18▲)
And furthermore, I would like to ‘experience individual differences in the sense of touch,’ so I am also working on research to create a tactile sharing device to share information touched by sensors with other people. (▲Picture 19▲)
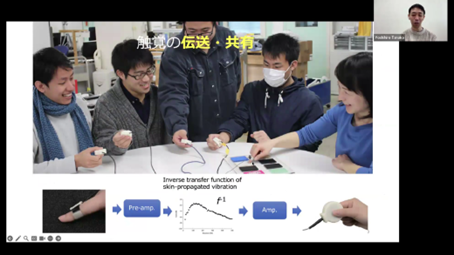
It is interesting to share the fact that some children’s fingers give off quite large vibrations even though they are small, that women’s touch is softer, and that some men feel low-frequency vibrations while others do not, even among the same men. This sense of touch is also related to movement, so it can be used in rehabilitation, for example, or in cooperative work between humans and robots. We believe that if we can learn about other people’s sense of touch, we can apply it to skill training and rehabilitation, for example, to improve abilities. We are conducting research with the idea that if we can understand subjective tactile sensation in this way, we will be able to learn more about people’s skills and sensitivities, and technologies that use this knowledge will emerge.”
Qualitative Differences in Touch:
The Challenge of Quantitative Measurement
Ishido: “I am currently working with Dr. Tanaka and Dr. Minamisawa of KMD on the development of tactile force testing. I am not a tactile specialist, so in talking with Dr. Tanaka, I am fascinated by the extremely deep and fascinating world of tactile sensation. I would very much like to hear from you today from a variety of perspectives.
First of all, I felt again that the sense of touch is a sense that is strongly related to physicality and subjectivity, but can we say that it is a sense with large individual differences compared to sight and hearing?”
Dr. Tanaka: “Since we have not yet quantitatively identified individual differences, I think it is difficult to indicate whether they are greater or not compared to vision or hearing. For example, in the case of vision, I also wear contact lenses, and when I take them off, I cannot see at all, because I am wearing contact lenses, which are less than 0.1. As for whether there is that much diversity in the sense of touch, I honestly don’t know yet because the modalities are different to begin with. Personally, however, even when I measure sensitivity, it varies from person to person, and tactile sensation also varies from person to person, especially where interpretation comes in, such as rough, smooth, moist, and smooth. I believe that there are individual differences not quantitatively but qualitatively.”
Ishido: “For example, in the case of sight, we can categorize sounds into “red” and “blue,” and in the case of hearing, into “high” and “low” sounds. On the other hand, there is no such clear division in the sense of touch, and even if we understand that there are individual differences, I feel that it is difficult to convey the extent of these differences.
With vision, it is possible to make specific suggestions to those who are having trouble, such as, “If you have this vision, you should wear glasses. However, it is difficult to share the difference in tactile sensation itself. What kind of expressions and methods do you usually use to communicate these individual differences?”
Dr. Tanaka: “Basically, there are methods to measure sensitivity to various frequencies. Simply put, we gradually increase or decrease the vibration and measure whether the vibration can be detected or not, and from the amplitude of the vibration, we can determine the sensitivity of the sense of touch. In our experiments, we make adjustments to eliminate individual differences as much as possible.
Ishido: “I feel that the difference in the sense of touch has not been well recognized in society until now. For example, at Corona Disaster, there were people who could not wear masks because of their hypersensitivity to the touch of their skin, but at first this was not understood and was sometimes taken as ‘selfishness. In the school setting as well, there are children who have difficulty wearing school uniforms due to sensory sensitivity, but I think it is difficult to say that these circumstances are not fully shared.
I have the impression that the term “hypersensitivity” itself has become more well-known than before in the wake of Corona, but is the fact that the difference in tactile sensation has not been well recognized in society to begin with because it is an area that has not been sufficiently studied compared to sight and hearing? Or are there other factors at play?”
Dr. Tanaka: “I think it can be said that research has not progressed. Research on tactile sensation inevitably requires stimulation. This requires development in the areas of robotics and mechatronics, and I feel that this is one of the reasons for the delay. Another problem is complexity. Even if something is rough or smooth, different people may perceive it differently, and this is where it differs from sight and hearing. For the sense of sight, RGB (the three primary colors of light) is easy to understand, and it is possible to get the desired color by adding this color and that color. On the other hand, it is difficult to do so with the sense of touch. I was surprised when I saw this slide, but colors can be changed continuously from red to green to blue. (▲Picture 20▲)
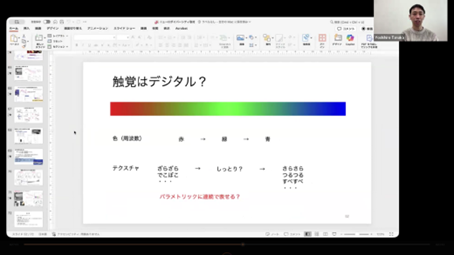
However, in terms of texture, there is roughness and bumpiness, smoothness and smoothness, etc., and if you change the volume, it is not quite the same as if moistness exists in between. Given this, I think it is difficult at present to say whether we can express the sense of touch by showing them in a parametric sequence if we increase the number of parameters. It is important to have the experience of categorizing the senses through one’s own body. For vision, if it can be quantified and expressed as visual acuity, individual differences can be quantified to some extent. For example, even if we can say, “Your sensitivity to vibration is about this,” we may have to use a different sensitivity, such as “I am very sensitive to roughness. I think this is an area where tactile sensitivity is not being handled properly.”
Ishido: “Onomatopoeia is often used to express the sense of touch. Japanese is a particularly rich language in onomatopoeia, and I feel that this is relatively advantageous in expressing the sense of touch. On the other hand, I am sometimes interested in how the sense of touch is expressed in other countries. What are your thoughts on this point?”
Dr. Tanaka: “Yes, that’s right. It is difficult to say whether it is rich or vague, but for example, overseas, it is expressed as it is in the image of an object, such as silky or milky. In a sense, it is correct. I think onomatopoeia is very Japanese, so it has richness of expression, but I think it has ambiguity.”
Embracing Tactile Differences as Assets:
A Perspective on Neurodiversity
Ishido: “I feel that many people’s awareness of the sense of touch may have been triggered by the coronary disaster. Terms such as tactile hypersensitivity and tactile insensitivity have become widely known, but how are these differences viewed from a research perspective? Could you tell us what differences are understood as hypersensitivity and insensitivity to touch, respectively?”
Dr. Tanaka: “There may be such a thing in hypersensitivity, where the sense of touch and pain become connected and turn from touch to pain. Of course, there is also simply a high or low sensitivity. In blunting, for example, there are cases where people who have had strokes become blunted, and I think neuroscience and brain science influence the decision to be hypersensitive or blunted. I don’t think it is possible to say uniformly because there is a mixture of blunting and hypersensitivity in various layers. For example, a weak skin can be hypersensitive. The sense of touch is closely related to the degree of force and the way we move our bodies. It’s not just about whether you are hypersensitive or insensitive to touch; it is fundamentally linked to what you do, so if you can understand that a little more, I think the techniques and materials will change.”
Ishido: “Hypersensitivity and blunting of the sense of touch have often been regarded as a relatively “troublesome” issue. For example, it has been pointed out that it affects daily life, for example, making it difficult to find something to wear.
Let me ask you two questions on this point. First, if a person has a vision problem, he or she can wear glasses, but if he or she has a tactile problem, what kind of measures can be taken? The second is that I feel that differences in tactile sensation, which have been regarded as a problem, can be regarded as “individuality” or “strength” from the viewpoint of diversity. If individual differences in tactile sensation are to be utilized as a strength, what direction do you think is possible?”
Dr. Tanaka: “Materials with less friction are also being developed. Also, in the rehabilitation of people who have lost their sense of touch after a stroke, by attaching a sensor to the dull hand and sending the vibrations acquired there to other parts of the hand that are not dull, they gradually come to be able to feel their own fingertips. Not only the sensation but also the dexterity of the hand has been improved.
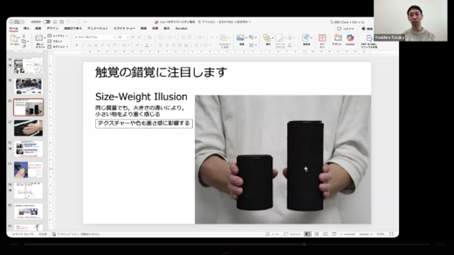
As for sensitive people, I think it would be effective to reduce the stimulation itself or to dull the stimulation by wearing a mask, but therein lies the difficulty of tactile sensation. It is difficult because of the basic need for contact and stimulation. What I think is good to consider as a way to deal with or approach blunting or oversensitivity is the illusion of touch. This is called Size-Weight Illusion, in which the sense of weight changes when the size is changed, even though the mass is the same. (▲Picture 21▲)
We believe that the successful use of such illusions is a possible approach in the future.
Regarding your second question, I really think you make a good point. I can’t show you specific examples of this kind of thing, but I think that having a high sensitivity to touch is an ability in itself, and I think it can be an advantage when creating things or expressing something.”
Ishido: “Certainly, just as sound sensitivity is utilized in piano tuning or a keen sense of smell is suited to perfume making, I felt that tactile sensitivity could also be utilized as a characteristic in detailed work. In this sense, I believe that individual differences in tactile sensation may be linked to occupational aptitude and strength.
We would also like to ask what kind of social applications tactile research will lead to in the future. For example, in the field of product design, how will the knowledge of tactile sensation be utilized and what kind of changes will it bring about?”
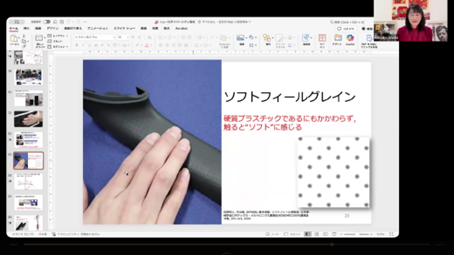
Dr. Tanaka: “The sense of touch is also related to the stiffness of the fingers. As people get older, their fingers inevitably become stiffer, and the force with which they touch an object will become stronger. If we can understand such individual differences in the sense of touch, we will be able to design products that are comfortable to use, not only in terms of touch, but also in terms of motion, such as the way one grips an object. Also, in terms of the previous illusion, for example, if you make geometric indentations on the surface of plastic, you can create a tactile feeling similar to leather. (▲Picture 22▲)
Something that is firm and hard to grip is hard to break, but as a tactile experience, hard is not very pleasant to touch. On the other hand, if you make it soft and squishy, it is easy to break. However, if we consider physical and sensory quantities to be not equal, we can design a product that is comfortable to the touch and close to leather, while still allowing for a firm grip. Using this approach, we can solve problems that we thought could not be solved by trade-offs. I believe that tactile knowledge and individual differences can be used in this way.”
Realizing Your World is Only One of Many:
Opening the Door to New Perceptions
Ishido: “Some people with sensory sensitivity have differences such as ‘I can wear clothes made of this material, but this material is difficult to wear. From this perspective, is there a possibility that in the future, it will be possible to know at the pre-purchase stage, ‘this material is suitable for people with this type of tactile sensitivity’?”
Dr. Tanaka: “This is a big goal on a large scale, but that is exactly what it is. It is easy to say “rough” and “smooth,” but we have learned that there are different weights for different people, such as those who consider bumpy surfaces rough and those who consider rough vibrations when touched. For example, if you look at the details of roughness and smoothness without lumping them together, you will be able to make more choices. That is what I would like to do.”
Ishido: “Even when using the expression ‘roughness,’ the way it is felt and defined differs from person to person, so even if the same word is used, it does not necessarily mean the same sensation in reality.”
Dr. Tanaka: “We are gradually learning about roughness, but when it comes to bumpiness and moistness, it is really diverse. We are trying to find out how we can solve the problem, but we are doing so in a very solemn manner.
However, there are, of course, many different kinds of comfort, but I still believe that there are some commonalities in comfort. While it is important to study each case study one by one, I think it is also important to cover them all and find out what they have in common. Recently, we have begun such efforts.
Specifically, what common denominators of comfort do you see in the brain science approach? My rule of thumb from a mechanistic perspective is that human skin is comfortable. When your skin and the other person’s skin touch each other, the hardness and temperature are similar because they are the same skin. In this way, they are in harmony with each other and no change in temperature occurs, so although there is contact, the boundary is ambiguous. I believe that if we can create this phenomenon of blurring of boundaries, we can make people feel comfortable.
For example, in our joint research with Unicharm, we explored the principle of a diaper that feels good against the skin. If you look closely, you can see that the structure also creates stimulation on the thumb ball, which gives a good sensation to the fingertips. In our joint research with Zebra, if you want to make a ballpoint pen more comfortable to write with, you usually think about reducing the friction of the ink or softening the part you grip. However, we worked on fixing the vibration of the part that is not in direct contact with the pen, the knocker. We think there may be a common element that makes it more comfortable, so we are trying that approach as well.”
Ishido: “This is very interesting. I realized once again the wide range to which tactile research can be applied.
It seems that many parts of today’s society are designed based on the assumption of “average,” so to speak. In many situations, the sense of touch is also unconsciously based on the assumption of average sensation.
If we were to review these assumptions and redesign society based on the differences in the senses of each individual, what do you feel are the gaps in the current situation? What areas do you think are important to start from in order to correct these gaps?”
Dr. Tanaka: “Originally, there are skill and sensitivity in the sense of touch, and when we understand these a little more, we will be able to perceive things in a variety of ways. For example, the tactile world of craftspeople is different from ours, so if we can sense this, we will be able to see the world in a richer way. Some people are more sensitive in their behavior, while others are rougher. If we can understand such things, we will be able to design various things differently.
I think it is important to think not only in terms of tactile sensation but also in terms of linking it to action and movement to broaden the application. Sensation comes out as action, so if we link tactile sensation with movement and action, and see what kind of diversity there is, I think we can advance our understanding and design.”
Ishido: “While tactile sensation is very interesting, I felt again that it is still an area that is not fully known. That is why I feel it is important for more people to know what it means to design a society based on the diversity of the senses.
In listening to Dr. Tanaka’s talk, I felt that while diversity can be viewed as people having various powers and characteristics, diversity in the sense that each person perceives the world differently is also a very interesting perspective. It seems as if we share the same world, but in fact each of us lives in a different sensory world. I think this is exactly the worldview that ‘The World in Our Minds’ is trying to show.
I felt that you are presenting such a way of the world from the perspective of tactile sensation.”
Dr. Tanaka: “I also believe that everyone sees the world differently through the sense of touch. As for the future, there are two things I want to do. One is to dig deeper. I would like to conduct basic research on why there are differences in the tactile sensation of various objects, to elucidate the cause-and-effect relationship, and to analyze individual differences and commonalities. The other is application. I believe that tactile sensation is closely related to experience. I would like to challenge the sharing of tactile sensation so that people can share their worldview.”
Ishido: “This may overlap with what you just said, but in closing, could you give us a message toward the realization of a neurodiverse society?”
Dr. Tanaka: “I think diversity is a very difficult issue. However, I think there are great benefits to be gained by working on it. There has not been much research on individual differences in the sense of touch, but my impression is that the number is increasing. This has led to new findings and diversity in research. Diversity is an important element to enrich society. I would like to learn more about diversity, not only in the sense of touch, and make the most of it in society.”
Ishido: “I felt that Dr. Tanaka’s research shows us the very realization that the world we perceive is by no means the only one. I think you have given us a great clue to understand what neurodiversity is from the perspective of tactile sensation. Thank you very much for your valuable talk today.”


